Lekce začíná dvěma ekvivalentními matematickými popisy měření:
Obecná měření lze popsat kolekcemi matic, jednou pro každý výsledek měření, způsobem, který zobecňuje popis projektivních měření.
Obecná měření lze popsat jako kanály, jejichž výstupy jsou vždy klasické stavy (reprezentované diagonálními matice hustoty).
Omezíme se na měření s konečným počtem možných výsledků.
Ačkoliv je možné definovat měření s nekonečně mnoha možnými výsledky, v kontextu výpočtů a zpracování informací se s nimi setkáváme mnohem méně často a jejich správná formalizace vyžaduje další matematiku (konkrétně teorii míry).
Nejprve se zaměříme na takzvaná destruktivní měření, kde výstupem měření je pouze klasický výsledek měření — bez specifikace post-měřicího kvantového stavu jakéhokoli systému, který byl měřen.
Intuitivně si můžeš představit, že takové měření zničí samotný kvantový systém, nebo že systém je okamžitě zahozen, jakmile je měření provedeno.
Později v lekci rozšíříme náš pohled a budeme uvažovat nedestruktivní měření, kde existuje jak klasický výsledek měření, tak post-měřicí kvantový stav měřeného systému.
Předpokládejme, že X je systém, který má být měřen, a pro jednoduchost předpokládejme, že množina klasických stavů X je {0,…,n−1} pro nějaké kladné celé číslo n, takže matice hustoty reprezentující kvantové stavy X jsou matice n×n.
Ve skutečnosti nebudeme mít velkou potřebu odkazovat se na klasické stavy X, ale bude pohodlné odkazovat se na n, počet klasických stavů X.
Budeme také předpokládat, že možné výsledky měření jsou celá čísla 0,…,m−1 pro nějaké kladné celé číslo m.
Všimni si, že tyto názvy používáme jen pro zjednodušení;
je jednoduché zobecnit vše, co následuje, na jiné konečné množiny klasických stavů a výsledků měření, přejmenované podle přání.
Připomeňme, že projektivní měření je popsáno kolekcí projekčních matic, které se sčítají na jednotkovou matici.
Symbolicky,
{Π0,…,Πm−1}
popisuje projektivní měření X, pokud každá Πa je projekční matice n×n a je splněna následující podmínka.
Π0+⋯+Πm−1=IX
Když je takové měření provedeno na systému X, který je ve stavu popsaném nějakým kvantovým stavovým vektorem ∣ψ⟩, každý výsledek a je získán s pravděpodobností rovnou ∥Πa∣ψ⟩∥2.
Také platí, že post-měřicí stav X se získá normalizací vektoru Πa∣ψ⟩, ale post-měřicí stav prozatím ignorujeme.
Pokud je stav X popsán maticí hustoty ρ namísto kvantového stavového vektoru ∣ψ⟩, pak můžeme alternativně vyjádřit pravděpodobnost získání výsledku a jako Tr(Πaρ).
Pokud ρ=∣ψ⟩⟨ψ∣ je čistý stav, pak jsou oba výrazy rovny:
Zde používáme cyklickou vlastnost stopy pro druhou rovnost a pro třetí rovnost používáme fakt, že každá Πa je projekční matice, a tedy splňuje Πa2=Πa.
Obecně, pokud ρ je konvexní kombinace
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
čistých stavů, pak výraz Tr(Πaρ) odpovídá průměrné pravděpodobnosti výsledku a, díky tomu, že tento výraz je lineární v ρ.
Matematický popis obecných měření se získá uvolněním definice projektivních měření.
Konkrétně umožňujeme, aby matice v kolekci popisující měření byly libovolné pozitivně semidefinitní matice namísto projekcí.
(Projekce jsou vždy pozitivně semidefinitní; alternativně je lze definovat jako pozitivně semidefinitní matice, jejichž všechna vlastní čísla jsou buď 0, nebo 1.)
Konkrétně, obecné měření systému X s výsledky 0,…,m−1 je specifikováno kolekcí pozitivně semidefinitních matic {P0,…,Pm−1}, jejichž řádky a sloupce odpovídají klasickým stavům X a které splňují podmínku
P0+⋯+Pm−1=IX.
Pokud je systém X měřen, zatímco se nachází ve stavu popsaném maticí hustoty ρ, pak každý výsledek
a∈{0,…,m−1} nastane s pravděpodobností Tr(Paρ).
Jak musíme přirozeně požadovat, vektor pravděpodobností výsledků
(Tr(P0ρ),…,Tr(Pm−1ρ))
obecného měření vždy tvoří vektor pravděpodobností, pro libovolnou volbu matice hustoty ρ.
Následující dvě pozorování potvrzují, že tomu tak je.
Každá hodnota Tr(Paρ) musí být nezáporná, díky faktu, že stopa součinu libovolných dvou pozitivně semidefinitních matic je vždy nezáporná:
Q,R≥0⇒Tr(QR)≥0.
Jeden způsob, jak tento fakt dokázat, je použít spektrální rozklady Q a R spolu s cyklickou vlastností stopy k vyjádření stopy součinu QR jako součtu nezáporných reálných čísel, který proto musí být nezáporný.
Podmínka P0+⋯+Pm−1=IX spolu s linearitou stopy zajišťuje, že pravděpodobnosti se sčítají na 1.
Předpokládejme, že X je qubit, a definujme dvě matice následovně.
P0=(32313131)P1=(31−31−3132)
Obě jsou pozitivně semidefinitní matice: jsou hermitovské a v obou případech jsou vlastní čísla 1/2±5/6, což jsou obě kladná čísla.
Také platí, že P0+P1=I, a proto {P0,P1} popisuje měření.
Pokud je stav X popsán maticí hustoty ρ a provedeme toto měření, pak pravděpodobnost získání výsledku 0 je Tr(P0ρ) a pravděpodobnost získání výsledku 1 je
Tr(P1ρ).
Například, pokud ρ=∣+⟩⟨+∣, pak pravděpodobnosti pro dva výsledky 0 a 1 jsou následující.
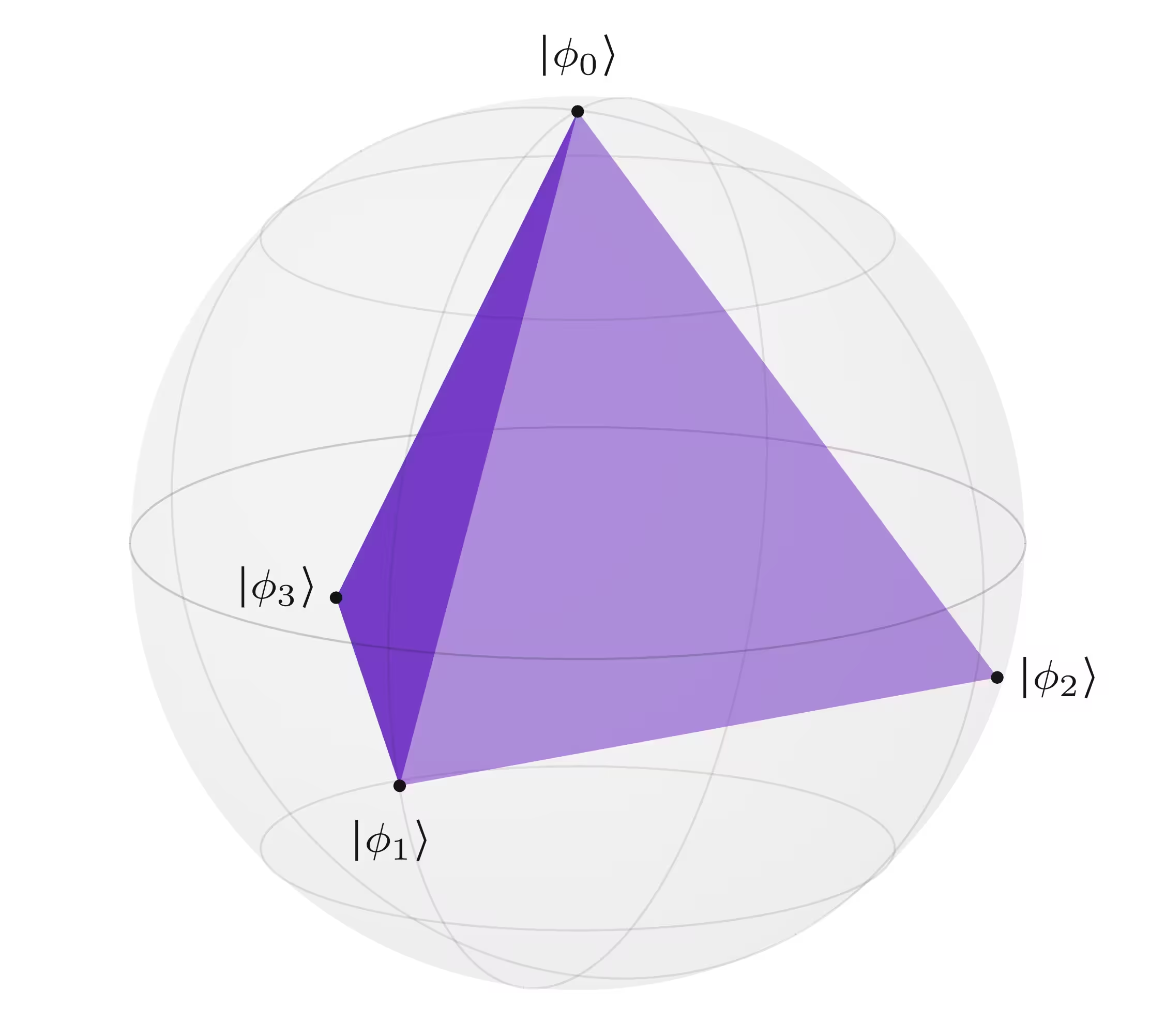
Tyto čtyři stavy jsou rovnoměrně rozloženy na Blochově sféře, každý je stejně vzdálený od ostatních tří a úhly mezi libovolnými dvěma z nich jsou vždy stejné.
Nyní definujme měření {P0,P1,P2,P3} qubitu tak, že Pa nastavíme následovně pro každé a=0,…,3.
Pa=2∣ϕa⟩⟨ϕa∣
Můžeme ověřit, že se jedná o platné měření, následujícím způsobem.
Každé Pa je zřejmě pozitivně semidefinitní, protože jde o čistý stav dělený jednou polovinou.
To znamená, že každá z těchto matic je hermitovská a má jedno vlastní číslo rovné 1/2 a všechna ostatní vlastní čísla rovná nule.
Součet těchto matic je jednotková matice: P0+P1+P2+P3=I.
Vyjádření těchto matic jako lineárních kombinací Pauliho matic umožňuje toto snadno ověřit.
Druhý způsob, jak popsat měření matematicky, je pomocí kanálů.
Klasickou informaci lze chápat jako speciální případ kvantové informace, pokud ztotožníme pravděpodobnostní stavy s diagonálními maticemi hustoty.
Takže z operačního hlediska si můžeš měření představit jako kanály, jejichž vstupy jsou matice popisující stavy libovolného měřeného systému a jejichž výstupy jsou diagonální matice hustoty popisující výsledné rozdělení výsledků měření.
Brzy uvidíme, že jakýkoli kanál s touto vlastností lze vždy zapsat v jednoduché, kanonické formě, která přímo odpovídá popisu měření jako kolekcí pozitivně semidefinitních matic.
Naopak, pro libovolné měření dané kolekcí matic vždy existuje platný kanál s vlastností diagonálního výstupu, který popisuje dané měření tak, jak bylo naznačeno v předchozím odstavci.
Spojením těchto pozorování zjistíme, že oba popisy obecných měření jsou ekvivalentní.
Než budeme pokračovat, buďme přesnější ohledně měření, ohledně toho, jak ho chápeme jako kanál, a ohledně předpokladů, které činíme.
Stejně jako předtím budeme předpokládat, že X je systém, který se má měřit, a že možné výsledky měření jsou celá čísla 0,…,m−1 pro nějaké kladné celé číslo m.
Nechť Y je systém, který uchovává výsledky měření, takže jeho klasická množina stavů je {0,…,m−1}, a měření reprezentujeme jako kanál pojmenovaný Φ ze systému X do Y.
Náš předpoklad je, že Y je klasický — což znamená, že bez ohledu na to, v jakém stavu začneme pro X, stav Y, který získáme, je reprezentován diagonální maticí hustoty.
Můžeme matematicky vyjádřit, že výstup Φ je vždy diagonální, následujícím způsobem.
Nejprve definujme úplně defázující kanál Δm na Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Tento kanál je analogický k úplně defázujícímu qubitovému kanálu Δ z předchozí lekce.
Jako lineární zobrazení vynuluje všechny mimodiagonální prvky vstupní matice a diagonálu ponechá beze změny.
A teď, jednoduchý způsob, jak vyjádřit, že daná matice hustoty σ je diagonální, je rovnicí
σ=Δm(σ).
Slovy řečeno, vynulování všech mimodiagonálních prvků matice hustoty nemá žádný efekt právě tehdy, když mimodiagonální prvky byly od začátku nulové.
Kanál Φ tedy splňuje náš předpoklad — že Y je klasický — právě tehdy, když
Φ(ρ)=Δm(Φ(ρ))
pro každou matici hustoty ρ reprezentující stav systému X.
Pro tyto stejné matice P0,…,Pm−1 tedy můžeme kanál Φ vyjádřit následovně.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Tento výraz je konzistentní s naším popisem obecných měření pomocí matic, protože vidíme, že každý výsledek měření se objevuje s pravděpodobností Tr(Paρ).
Nyní si všimněme, že dvě vlastnosti požadované od kolekce matic {P0,…,Pm−1} pro popis obecného měření jsou skutečně splněny.
První vlastností je, že všechny jsou pozitivně semidefinitní matice.
Jeden způsob, jak to vidět, je pozorovat, že pro každý vektor ∣ψ⟩ s prvky odpovídajícími klasickému stavu X máme
Transpozice každého Pa se zavádí při třetí rovnosti, protože
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
To umožňuje, aby se objevily výrazy ∣b⟩⟨b∣ a ∣c⟩⟨c∣, které se po sečtení přes b a c zjednoduší na jednotkovou matici.
Z předpokladu, že P0,…,Pm−1 jsou pozitivně semidefinitní, jsou pozitivně semidefinitní i P0T,…,Pm−1T.
Konkrétně, transpozice hermitovské matice dává opět hermitovskou matici a vlastní čísla libovolné čtvercové matice a její transpozice se vždy shodují.
Z toho plyne, že J(Φ) je pozitivně semidefinitní.
Vytrasováním výstupního systému Y (což je systém napravo) dostaneme
Předpokládejme, že máme více systémů, které jsou kolektivně v kvantovém stavu, a na jednom z nich se provede obecné měření.
Výsledkem je jeden z výsledků měření, vybraný náhodně podle pravděpodobností určených měřením a stavem systému před měřením.
Výsledný stav zbývajících systémů pak obecně závisí na tom, jaký výsledek měření byl získán.
Podívejme se, jak to funguje pro dvojici systémů (X,Z), když se měří systém X.
(Systém napravo pojmenováváme Z, protože Y budeme používat jako systém reprezentující klasický výstup měření, když ho chápeme jako kanál.)
Potom můžeme snadno zobecnit na situaci, kdy jsou systémy prohozeny, i na tři či více systémů.
Předpokládejme, že stav (X,Z) před měřením je popsán maticí hustoty ρ, kterou můžeme zapsat následovně.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
V tomto výrazu předpokládáme, že klasické stavy systému X jsou 0,…,n−1.
Budeme předpokládat, že samotné měření je popsáno kolekcí matic
{P0,…,Pm−1}.
Toto měření lze alternativně popsat jako kanál Φ ze systému X do Y, kde Y je nový systém s klasickou množinou stavů {0,…,m−1}.
Konkrétně, působení tohoto kanálu lze vyjádřit následovně.
Uvažujeme měření systému X, takže pravděpodobnosti, s jakými jsou získány různé výsledky měření, mohou záviset pouze na ρX, redukovaném stavu systému X.
Konkrétně, pravděpodobnost pro každý výsledek a∈{0,…,m−1} lze vyjádřit třemi ekvivalentními způsoby.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
První výraz přirozeně reprezentuje pravděpodobnost získání výsledku a na základě toho, co už víme o měřeních jednoho systému.
Pro získání druhého výrazu jednoduše používáme definici ρX=TrZ(ρ).
Pro získání třetího výrazu je potřeba více přemýšlení — a čtenáři jsou vyzváni, aby se sami přesvědčili, že je pravdivý.
Zde je nápověda: Ekvivalence mezi druhým a třetím výrazem nezávisí na tom, zda je ρ matice hustoty, ani na tom, zda je každé Pa pozitivně semidefinitní. Zkus to nejprve ukázat pro tenzorové součiny tvaru ρ=M⊗N a pak z linearity vyvoď, že to musí platit obecně.
Zatímco ekvivalence prvního a třetího výrazu v předchozí rovnici nemusí být okamžitě zřejmá, dává smysl.
Vycházíme z měření na X a efektivně definujeme měření (X,Z), kde jednoduše zahodíme Z a měříme X.
Jako všechna měření i toto nové měření lze popsat kolekcí matic a není překvapivé, že toto měření je popsáno kolekcí
Pokud chceme určit nejen pravděpodobnosti různých výsledků, ale také výsledný stav Z podmíněný každým výsledkem měření, můžeme se podívat na kanálový popis měření.
Konkrétně se podívejme na stav, který dostaneme, když aplikujeme Φ na X a s Z neděláme nic.
jak jsme viděli v lekci Matice hustoty.
Pro každý výsledek měření a∈{0,…,m−1} máme s pravděpodobností
p(a)=Tr((Pa⊗IZ)ρ)
že Y je v klasickém stavu ∣a⟩⟨a∣ a Z je ve stavu
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
To znamená, že toto je matice hustoty, kterou získáme normalizací
TrX((Pa⊗IZ)ρ)
vydělením její stopou.
(Formálně řečeno, stav σa je definován pouze tehdy, když je pravděpodobnost p(a) nenulová;
když p(a)=0, je tento stav irelevantní, protože se vztahuje k diskrétní události, která nastává s nulovou pravděpodobností.)
Přirozeně jsou pravděpodobnosti výsledků konzistentní s našimi předchozími pozorováními.
Shrnutí: toto se stane, když se měření {P0,…,Pm−1} provede na X, když je (X,Z) ve stavu ρ.
Každý výsledek a se objeví s pravděpodobností p(a)=Tr((Pa⊗IZ)ρ).
Podmíněno získáním výsledku a, stav Z je pak reprezentován maticí hustoty σa uvedenou v rovnici (2), která se získá normalizací TrX((Pa⊗IZ)ρ).
Tento popis můžeme přizpůsobit dalším situacím, například když je pořadí systémů obrácené nebo když máme tři či více systémů.
Koncepčně je to přímočaré, i když vypisování vzorců může být zdlouhavé.
Obecně, pokud máme r systémů X1,…,Xr, stav složeného systému (X1,…,Xr) je ρ a měření {P0,…,Pm−1} se provádí na Xk, stane se následující.
Každý výsledek a se objeví s pravděpodobností
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
Podmíněno získáním výsledku a, stav (X1,…,Xk−1,Xk+1,…,Xr) je pak reprezentován následující maticí hustoty.